技术交流
[ETH 数字建造]一种建造的新物学
http://www.douban.com/note/479193959/
关键词:材料 数字建造 数字工艺
摘要:文章翻译并增改自《The Robotic Touch》一书中的章节导言,阐述了 ETH 建筑学院数字建造教研室 DFab(Digital Fabrication)对于数字建造技术下材料、工具和设计三者关系的思考;文后附以6组方案,简要介绍了 DFab 自2005年以来的教研成果。
Keywords: material, digital fabrication, digital handcraft
备注:下文出自 DFab 于2014年出版的《The Robotic Touch》第三章同题导言,中文版本翻译自德语原稿并有所增改,与书中英译版存在部分差异。
=============================================================================
对于“建造”,我们可以肯定它不只归属于建筑这一项领域,而应该属于更大的物质概念的范畴。于是我们提出进一步的观点:“建造”是一门关联人与物质的学问和艺术,它把众多的物质材料转变为建筑,建筑因建造而成为一个空间和几何的整体。而在机器人参与的“数字建造”中,“建造”以一种全新的激进方式,将设计和生产清晰地联系在了一起。与此同时,众多事实都在证明,机器人与建筑的传统构造和材料不断紧密地结合,构造及材料内在“建构性的自然属性”[02]通过与信息时代的数字化逻辑共同作用,使得建造的传统得到了延续,众多传统材料都在当代挖掘出了自身的潜力,找到了新的表现形式, 。
本文想要强调的其中一项中心论点是:建筑学正在酝酿一项重要的变革,我们理解材料和建造的方式将会得到改变和发展,只是遗憾的是,我们至今几乎没有深刻地讨论过这个问题。作为全新的建造工具,机器人的介入,不仅在一方面导致了学科内对建造原则和材料属性理解的根本性转变,同时在另一方面,因为传统建筑材料和建造方式在完全革新的建造生产中得到了全新的诠释,我们也能够以此为契机,重新回归到传统中去。材料作为建筑的物质根本,构造作为联系物质的内在关系,工具作为建造中介入的第三方,这三个要素自古以来就不可分割。要在物质属性这一层面上去理解建筑,我们必须把建筑理解为三者共同作用下的产物。在当代技术高速发展的大环境下,工具的持续革新不断改写着构造的可能性,同时各种材料也籍此不断挖掘出自身更多的潜力。机器人的应用正是技术发展的一个重要表现,材料、构造和设计三者间的关系,也因为当代对机器人的应用变得更为紧密了。
在更深的层面上,建筑和建造有着不可割裂的关系,本质上,它们始终在追寻着共同的组织原则。因为这一层的关系,建筑包含了一项属性,就是需要寻求一个物质和建造上紧密关联的空间和几何秩序;与此同时,建造同样也在寻求物质材料和建造过程中(建构上)操作和结构的秩序。在这层意义上,建筑和建造两者都追寻着同一个目标,去“遵循并维护世界的秩序和规则” 。[03]
90年代伊始,工业领域开始从机械化技术向数字化技术过渡,这一转变对建筑生产造成了深远的影响,甚至改变了其根本的模式。发展至今,利用工业化数字技术,加工材料并直接生产出非标准化的建筑构件,已经变得十分平常。在工业时代中,标准化生产曾经是技术革新的驱动力量,而如今通过数字化技术实现“独一无二”的构件,也成为了信息时代的驱动力量。早在50年代,美国军方就已推动并开发出第一代计算机控制的制造机器。至少,在理论上,这批机器当时就具备了突破工业标准化生产中种种限制的能力。在后来的50年里,电子控制器不断地小型化,可用性也不断地提升,并逐渐被投入到各种工业应用中去,最终成为了我们今天所熟知的数控技术(CNC)。并非巧合,斯坦利·戴维斯(Stanley Davis)在他1987年的《完美的未来》(Future Perfect)一书中介绍了“大规模定制”(Mass Customization)的概念:通过大规模生产方式来制造独立产品。[04] 传统的大规模工业生产将导致产品的单一化,而这个概念的提出,正是指大规模生产下仍可能经济地制造出非单一的独立产品。 [05]
=============================================================================
1.一个简要的自证
即便如上所言,我们相信在数字技术的支持下,标准化生产向大规模定制的转变也并非完美,而且也并不是设计和建造的必要条件。因为数字建造技术迄今仍受限于各种构造原理的特殊性,并未能够实现高度的自由,所以在实际的建造中,建筑设计中的各项信息仍未能够得到彻底的转换。
工业用机器人是区别于传统非标准化生产的决定因素。本来,建筑“构件”的信息一向只是局限于其自身的几何属性,而直到机器人的引入,这些信息的疆域得到了拓展,建造的动态“过程”的信息也被包含进了这些“构件”内部。也正是因此,机器人制造的“构件”的内含信息可以实现高度的特殊化,我们可以针对其特殊的功能和材料的属性进行设计和描述,而同时通过相应的参数化操作,也就能够实现其潜在无限可能的形式。在制造的过程中,我们不再须要精确地去定义建筑构件的绝对尺寸,而只需要定义其材料自身的属性、空间上的建造逻辑以及构件之间的构造关系。[06] 今天的钻床、切割器或三维打印,从某种意义上讲仍是基于特殊几何形式的技术,而非基于空间的构造关系,因为它们相对地忽视了材料本身普适的物理属性和其隐含的构造特性。[07] 相反,透过对普通材料和普通构件进行特殊的空间装配和操作,可以更灵活地对种种不同的需求作出系统性的回应,将个体的“特殊化描述”[08] 置于重要地位,并将其材料属性和构造关系考虑进去。简而言之,建造逻辑的内在数字信息,才是脱离了纯粹的几何形式,而与材料属性和建造行为本身密切相关的。
事实上,因为数字控制的空间和几何操作可以实现近乎无限的多样性,机器人可以实现近乎无限的可能性。与传统的建造工艺相比,我们不能再仅仅对产品进行几何性描述(平立剖),而必须使用程序和算法,对产品信息进行规范化的描述。以此产生的建造数据不再仅仅是几何尺寸,更包含了额外信息,比如材料的物理属性及其构件搭建的编排顺序等等。我们可以在计算机上验证这些信息,并直接输出至机器人,控制搭建材料时在空间和时间上的次序。几何原本是设计中决定性的因素,而现在我们必须将建造的动态信息置于重要的地位。针对材料特性所产生的建造信息,连接起设计和施工,其地位也因数字建造技术的介入得到大幅提高,并为设计本身赋予了更为深层的关系:我们不能将设计和施工再作为相对割裂的两个先后阶段来看待,对设计和建造的关注必须贯穿始终,两者需要直接对话并且动态地持续互相反馈,也就是说,在设计中必须意识到其材料和结构在物理上的可操作性,并将时间和空间次序的概念包含在内。这一套对于建造的“预审”机制,为建筑设计中对于建造和构造的理解赋予了一个核心的意义。
=============================================================================
2.基于加法逻辑的实际建造
我们可以把基于加法逻辑的建造简化地理解为某种意义上的三维打印,只不过通过机器人的应用,它可以建造足尺的建筑。相较于减法式或倒模式的建造,加法的优势在于使用最简单的一般性材料,针对其基本物理属性在建造的环节上加以处理,建造出复杂且满足需求的建筑构件。此外,对于几何上相对复杂的结构,加法式的设计只在构造必要的地方使用材料,实现了更少的用料和更低的自重。
正是在这一点上,我们看到了机器人加法式建造的核心价值所在:设计将高度抽象的信息蕴含在建筑构件中,针对其尺寸、构造和结构上的自有条件以及其材料的自有属性,在最内在的层面上应对不同情况进行特殊设计,并以适宜的方式应用到建造之中。
在设计中处理复杂的建筑构件时,必须遵循以上原则,逻辑地去描述其几何关系、材料和构造的系统关联性以及建造的顺序,清晰地表达其在建造中如何互相搭接、互相制约。在整个建造过程中,除了考虑到建造的时间纬度, 还需照顾到各个状态下构造的稳定性以及材料本身的承载能力。[09]
=============================================================================
 |
 |
 |
 |
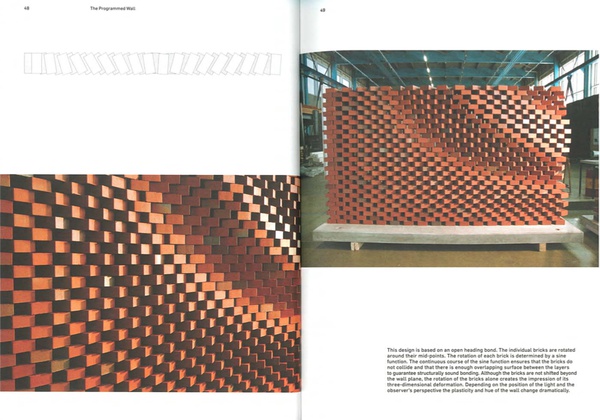
3.以更开放的态度看待模数化建造——材料和工具中两种隐含的“一般性”
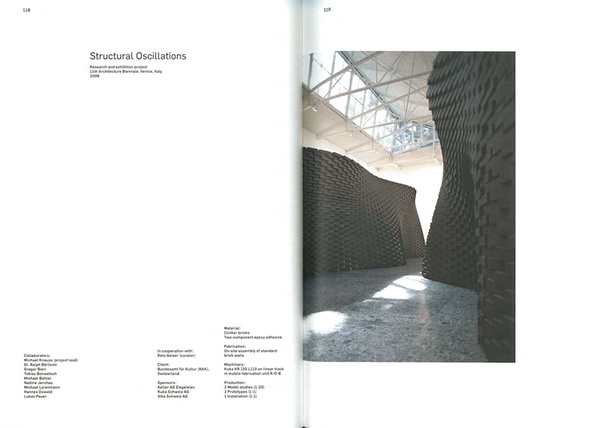
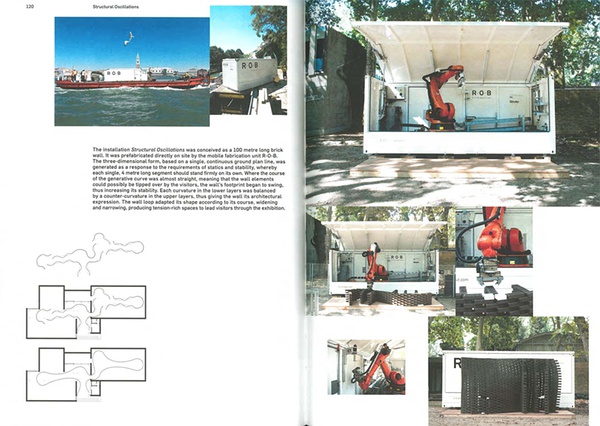
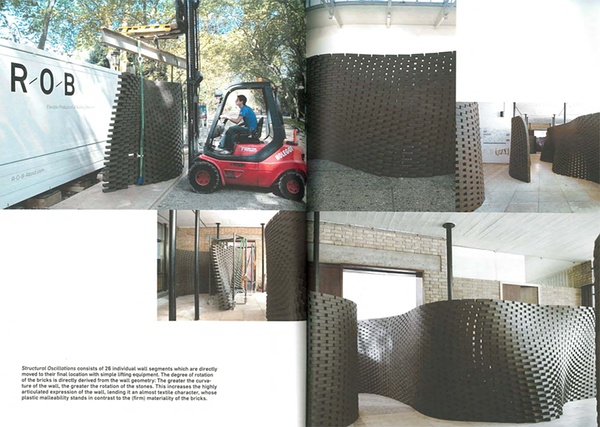
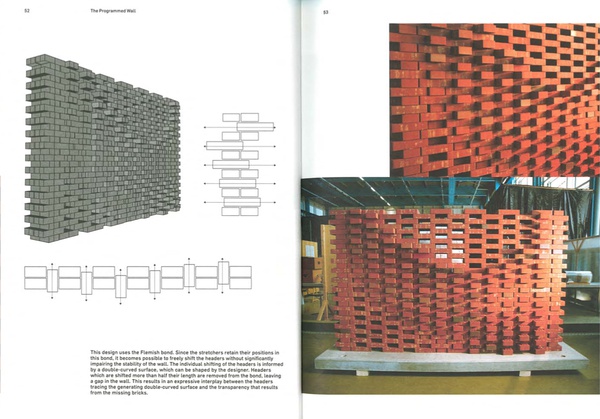
正如本文众多项目所展示的,各异的材料和无数的构件通过精细的组织,在机器人的建造下展现出了极高的几何精确性,同时各部件在空间上各异的复杂关系与整体性也得到了统一。 然而,使用机器人将简单的基本构件组装成一个复杂的整体,对于这样的一种愿景,需要对所谓“一般性”的建筑构件做一个简短的讨论。或许我们应该回到一个具体的例子上来,拿最简单的材料来说,比如砖,因为它能以各种方式建构成非常复杂和特殊的构造,所以从原则上讲,砖可以被认为是具有“一般性”的。我们也可以说,虽然它的形式有着清晰的几何定义,但是相对的,它的建造逻辑却被弱化了,材料的物理属性也被简要地呈现为视觉上的材质。
砖作为最常见的材料,因为形式简单,所以它的搭接和构造都非常自由,在建造中可以轻易实现各种非常细微的平移或者旋转。与这种一般性的材料相反,特殊化的建筑构件则因为其特殊的形式,在建造中的操作自由度会收到限制。这些操作的自由和限制是可以清晰的定义出来的,它们都是一些基本的物理关系,比如构件之间的碰撞和倾斜,各砖块在结构上的关联效应等等。沿此思路,当我们不再局限于传统线性的建造规则时,建造的逻辑就开始变得非常复杂。每个砖块之间的依赖关系复杂多样且互相制约,传统建造和设计中的简单规则不再适用,设计和建造的工作都必须借助于算法。在今天的信息时代,作为建筑最常见的材料、最小组成分子的砖是否仍能够成为建筑的“颂歌”,值得打上一个问号。[10] 不过,有一件事可以肯定:即使时至今日,砖仍然是最“一般”、最“普通”的材料——特别是在机器人的手里!
使用机器人并不只是因为它有助施工,更是因为缺少它便无法实现高度离散和差异化的结构。 在传统的建造中,一旦建筑材料或构件出现特殊的几何或交接,其搭接的可能性和建造的逻辑就会受到限制,这样导致的结果,往往是人工操作比机器人更简单高效;在这种情况下,建造中使用机器人的优势也就仅仅局限于将人工操作的步骤自动化而已,而并没有发挥出机器人以及材料在数字逻辑下的潜力。机器人真正的潜力,在于能够以“一般性”的方法应对无数特殊的情况。这段讨论恰恰说明了,本文所展示的项目为什么都使用像砖块和木条这类看起来非常简单的一般性材料和构件。在这些项目中,普通材料和构件的“一般性”(das generische Moment/genericness)以及机器人的“一般性”[11] 两者得到统一,特殊和定制化的建造也因此得以实现。这两种隐含的“一般性”根植于数字化设计和建造,建造中的条件深远地影响了建筑设计,同时建筑设计也全面地提供着建造所需的信息。
=============================================================================
 |
 |
 |
 |
 |
 |
 |
 |
4.设计一种自适应的建造方式
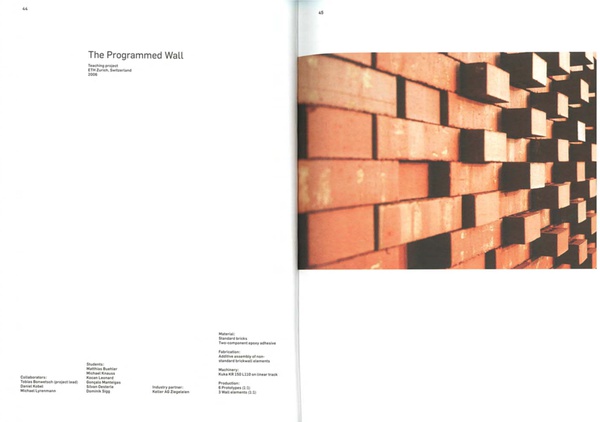
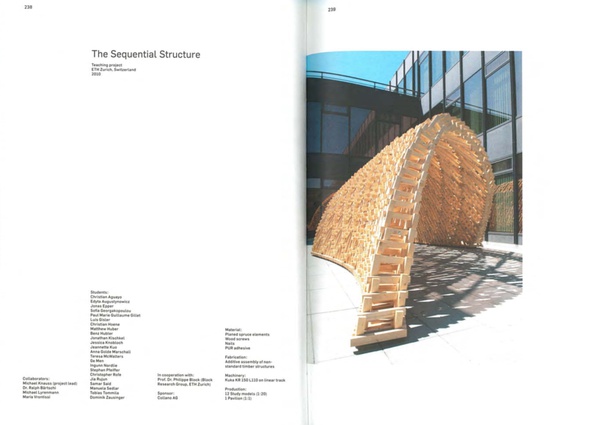
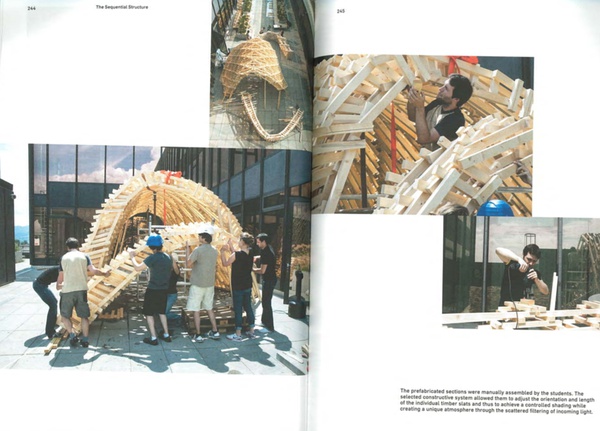
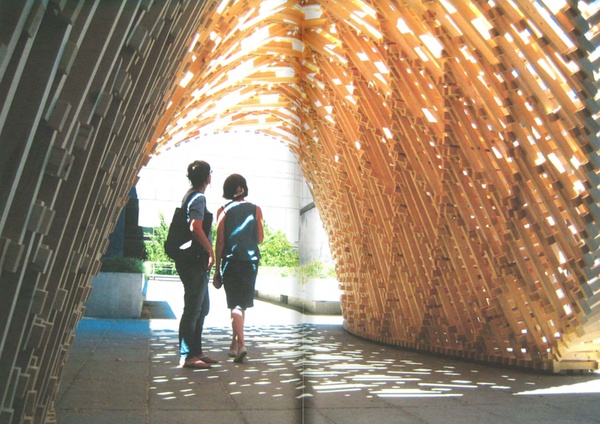
从“编程化砖墙”(The Programed Wall)项目开始,我们一路尝试了很多不同的项目,以求探索使用机器人装配一般性材料和构件的潜力,并试图在设计中将材料的构造特性系统地考虑进去。我们的“序列结构”(The Sequentials)系列项目是很好的例子,此系列从“序列墙体结构”(The Sequential Wall)开始,后续的项目陆续地实验了很多不同的结构原型,后来实验的成果发展成为 ETH 建筑技术实验室厂房(Arch-Tec-Lab)里不规则形体的“序列屋架结构”(The Sequential Roof,详情见文后)。在这个项目中,一品品的木杆两两错位相连,堆叠出自由的形态。相对于砖块,木材的物理属性使得其可以在建造的流程中被轻易地进一步加工。[12] 机器人通过很简单的步骤,即可按照所需以任意角度和特定长度切割木杆,并同时将它安装在准确的位置。这一优势在“复杂木构”(Complex Timber Structures,详情见文后)这个项目中也是同样适用的。普通的木杆作为标准化的工业材料经过加工,转变为特殊且独特的建筑部件。这一过程中,材料按需进行定制,并在其构造的逻辑内部产生了额外的自由定制的空间。就是说,相对于直接制作整体不可分的特殊部件,使用标准化元件去制作特殊部件,本身在构造上就获得了更大的自由度,同时也释放出了材料内在的潜力。因为自由度的增加,不只信息化程度得到提升,而且像平面与曲面的无缝过渡等各种精巧的结构都可以得到实现。
 |
 |
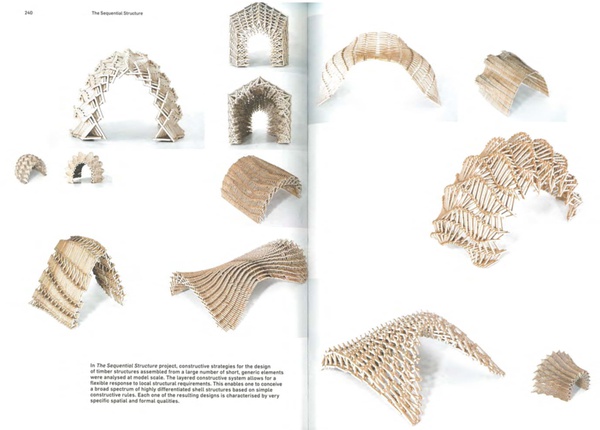
在“序列屋架结构”(The Sequential Roof)这个项目里,离散的标准化元件通过堆叠,形成了一个特殊的连续渐变结构;在“复杂木构”(Complex Timber Structures)里,每一品木杆长度各异且处于不同的方向,整体仍形成一个自承重结构。在建造的概念上,一般性和特殊性的边界在这个结构中被模糊了,工业化和定制化的隔阂也消除了,在视觉上同时也产生了某种暧昧的感知:整体上它有着独一无二的特殊造形,同时个体上却仍然是一般性的元件。[13] “序列屋架结构”(The Sequential Roof)以加法堆叠出的木构件因重复而产生着韵律,同时各构件在方向和长度上各异的渐变又与之共鸣,每一品木杆各在其位,又共同地消融成为一个新的整体。
通过系统化的编程,结构体系能够针对材料和构件所在位置的特殊情况,灵活地作出构造上的回应,并根据材料属性、找型、结构和施工技术的参数,整体地进行优化。这种复杂的系统显然无法通过传统的人工设计方法实现。在“序列屋架结构”(The Sequential Roof)以及“复杂木构”(Complex Timber Structures)两个项目中,如果移动一品木杆,其他无数关联构件的几何和建构关系都必须随之修改,单个元件和整体的关系也随之改变。当建筑元件的数量达到某种“临界值”时,数字化设计和建造就不再仅是有所帮助,而是成为不可缺少的一环。在这种情况下,我们无法再以静态的图纸去描绘设计,我们需要的是一整套基于编程的规则。建造和设计以这种形式无缝地连接在一起,只要在设计过程中给予了构造足够的自由度并且将其充分参数化,即使在设计的收官阶段也可以高效地进行底层的修改,只需对设定好的参数进行调整,程序算法(建造的逻辑)即可快速地得出更新后的结果。这种方式,并非只是纯粹功能主义范畴的操作,而更多地关注流程中的设计和建造方法,以期最终能够达到构造和材料应用上的创新!
=============================================================================
5.题外话:数字工艺
根据定义,机器人制造的建筑部件是具有独特性的(如“序列结构”系列)。人们通常将这种构造的独特性或个体性理解为对标准化生产的一种逃离,并会潜意识地联想到前工业时代每一件都独一无二的手工业制品。但当讨论到数字工艺时,我们必须首先意识到:它的价值既非机器人对人类手臂运动的模拟,也非对于特殊手工工艺的模仿[14],更不在于其最终产品形式的独特性。数字工艺更多的是一种概念上的整合,也就是将数字化的设计和建造融合在一起。只有当建筑师能够直接介入到材料的加工环节,并且对材料在造形上拥有了独立操作的自主空间,数字工艺才算是真正地开始。
19世纪中期,主流的材料逐渐从传统材料转变为钢和玻璃,以及其他机械大规模制造的材料。这场材料的变革,引起了对于建筑和建筑两者关系的激烈讨论。约翰·罗斯金(John Ruskin)在他1849年的《建筑七灯》一书中详细解读了这一变革。[15] 他在创造性的手工艺和当时流行的大规模生产中选择了前者,对工业化生产的技术、社会和经济条件提出了质疑,并且将关注点从机械化生产上抽离,转而关注材料自身性能与其加工方法两者间的关系。[16]
正如罗斯金所言,沿袭自中世纪手工艺的传统建造方法,经过新的调整和重新理解后可以满足新时期的建筑要求。与后工业化时代的建筑不同,在当时,图纸和绝对度量单位并非最基础的因素。[17]当时的工匠们凭借着经验、直觉和手工技艺,制作出需要的元件,并将它们精确地组装起来。因此,当时建筑所具有的独特性,并非工匠们追求的目标,而只是其生产体制下的副产品。[18]手工艺因此成为了一种连接的桥梁,它连接着由材料物理属性决定的加工技术和手工艺者创造性的工作。对此,罗斯金提出在传统的手工艺中,材料的构造学和人类学价值得到了统一共存,产生了文化上的价值。[19]
而在当代数字工艺的语境下,机器成为了直接连接人与材料的中介工具。手工艺式的操作方式通过数字化技术得以重现,这些数据包含了描述产品以及控制机器的信息。藉此,数字化建构与人类学和手工艺再次融合在一起。但,这绝不是对罗斯金理论的一种怀旧。我们并不是要使用机器人重现当年的工匠,而是要将工匠的技能和知识提取为信息,并且结合进数字工具进行重新思考。我们并不是单单要模仿手工工艺并将其自动化,而是要将手工艺操作的定义在机器的逻辑、技能和机制上进行扩展。简而言之,手工艺在数字化思维中的体现,是对于各工序间关系的思考——我们不再通过口述或者图纸,而是通过算法和数据去理解材料和建造。由此,一种新的“工艺文化”诞生了,它通过制定一套框架和规则,去定义建造的特性,并直接与材料的加工连结在一起。
=============================================================================
6.机器人建造中的“软”标准
虽然在数字时代,机器人建造与手工式生产有着可以类比的关系,但标准化生产的原则并不是其中的核心问题,“非标准化”这一概念主要关注的是建构物形式的多样性,但却无法提供更多高出本身的意义。虽然数字化建造提供了各种各样的可能性,但它也无法完全回避生产中的标准化问题。包括编程在内的各项工作,为了保证设计可以有效地实施,设计和建造仍然须要遵循一套准则和规范。换句话说,生产仍然是标准化的,只不过这种形式的标准化属性在最终的产品里面看不到了。[20]
所以,要理解和回答是否标准化的问题,关键并不在于“标准”本身。在加法式的机器人建造中,编程式的思维以及标准和“非标准”之间相互的转变,不止影响着建筑的形式,而是深刻地贯穿了整个建造流程。由于机器人建造的逻辑和手工作业不同,并不依靠直觉和经验去装配建筑部件,而是依赖事先定义的精确尺寸和动作。所以,构造的灵活性在整个工序中越来越重要,感应器和调节技术的加入,也使得机器人得以自动地适应误差进行调节。当前大多数的建筑材料和构造方式还无法满足工业用机器人的精度要求,所以这种“自适应式”的建造变得至关重要。其中,数字的绝对精确性、几何尺寸的高度完成性、以及机械的准确性,在三者的共同作用之下,我们意外地找到了一条通往相似于手工化定制建造的道路——各种约束条件在技术的辅助下得到了解放,材料和构造设计的适应能力和灵活性成为了整个流程中的重点。
 |
因为对于材料和构造的这种全新的理解,建筑设计的能力也得到了扩展。比如在“智能动态滑模浇筑”(Smart Dynamic Casting,以下简称“智能滑模”,详情见文后)项目中,我们并没有去设计最终的结果,而只是关注混凝土本身的物理属性以及滑模拉升和旋转的速度。这一类结合了建造的设计方法,尤其关注“软”的内容,材料的属性得到了诚实的表达,材料的物质性和设计的抽象性不断交替影响着对方。这类方法同时反映出了技术在底层上的改变,自工业时代以来对于规范和标准的基本概念,也会在未来发生变革。过去“硬件标准化”的宗旨在于统一规格,减低复杂度,统一建筑部件的尺寸和制造的流程,在未来的建造生产中,“软件标准”会逐渐形成,各种材料在建造上相互影响的关系,将会要求各项前期的设计工作对其相互适应性进行充分的考虑。
=============================================================================
7.以材料特性作为建造的范式
综上所述,我们提出这样的命题:机器人能否超越机械式的工作,不单单只是处理各个建筑构件的几何信息,而是能够根据不同材料内在的固有性质,做出针对性的区别处理?通过这种方法,是不是可以极大地解放出数字化设计和数字建造的巨大潜力?
让我们继续以“智能滑模”项目为例展开讨论。在传统的混凝土倒模工艺中,支模和浇筑是两个割裂的独立工序,而在滑模工艺中,两者虽然同时进行,但是模板拉升的路径仍然依属于墙体线性的机械形式。我们在实验里尝试对滑模工艺进行全新的诠释:模板在拉升中做出连续的旋转动作,浇筑出动态的混凝土,成果的形式即是建造工艺本身的反映。在动态滑模的过程中,如果模板拉升的速度太快,未完全定形的混凝土会从模板下渗流而出;如果太慢,则混凝土趋于干结,过高的阻力会导致结构断裂。我们使用机器手臂上的感应器测量混凝土的水合程度,通过反馈得到的材料物理信息,不断调整并优化拉升的速度。[21] 如此,材料的性格以数字信息的形式传递到建造工具,融入到了构造的逻辑中去,工具与材料共同反应,得到最终的设计成果。
这个实验再一次证明了我们的观点:最终成果的形式并非设计的起点,设计所关注的重点,更多的在于把握材料的性质以及成形的过程。对于材料根本特质的理解,决定着数字化设计和数字建造的深度和广度。“智能滑模”这个实验对我们有着十分重要的意义,因为它将原本割裂的独立工序整合成为连续的施工,拓展了加法式机器人建造的范式。和现今过分宣传的三维打印技术相比,首先,它是在足尺寸的建筑尺度上进行的操作,其次,在“建造”这一层面上,它将材料的特性彻底融进了构造本身的逻辑中去。[22]
=============================================================================
8.对于“建构性自然属性”的重新定义[23]
诚然,当今建筑数字化的情况确实是非常特殊的:机器人应用和感应反馈技术的发展,从内在的层面上,大大拓展了建筑学学科对材料应用逻辑的认识,更新了人们对于建造的理解。在这种与建造紧密相关的理念下,“建造”并非为了机械地实现设计中的形式,而是需要人们去深刻地理解材料的特性以及其建构性的能力。在“序列屋架结构”(The Sequential Roof )中,独立切割出的各品木构件层层叠加;在“智能滑模”中,滑模通过数控技术直接塑造出动态的混凝土。这两个项目里,建造中材料的性能影响到了设计的策略,直接参与到建筑设计中去。对于材料的考虑,在设计和建造两个阶段中间撘起了一座桥梁,非物质的内容(设计)和物质的主体(建筑物)高度地咬合。从这个意义上,建筑概念和建造的咬合能力得到了提升。“在整个建筑设计的过程中,对于设计目标的不断追问和发展,对于物质上实现方法的不断具体化,都反映着”这种咬合。[24] 建筑中机器人应用所带来的“解放”,并非让我们减少了对构造的关注,相反的,我们需要把更多的注意力,放在数字技术对设计和建造的影响。从这一点来说,作为工具的数字建造技术,发掘出了材料内在的潜能,并与设计直接关联起来。这正恰恰体现出了它“建构性自然属性”[25],材料、工具和设计因此整合在一起,达到一种“关于建造的新的物学”。抛开纯粹的数字化论调,我们认为(数字化)建造的实践和思考,正以其特殊的方式,催生着建筑学新的意义。
录入:2015/10/26 11:24:34 点击:6066
返回电脑版